




 Рейтинг: 4.4/5.0 (1864 проголосовавших)
Рейтинг: 4.4/5.0 (1864 проголосовавших)Категория: Инструкции
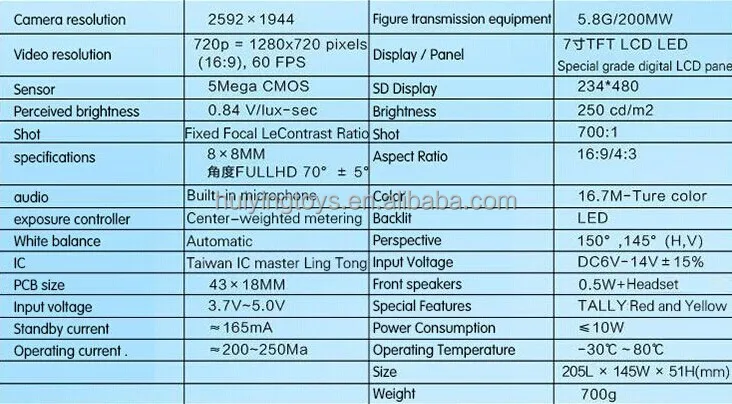
Модель: CX-20 Open Source
Тип: Р\У Квадрокоптер
Полетные режимы: Ручной, удержание высоты, удержание положения, возврат домой, полет по точкам и др.
Частота: 2.4GHz
Дальность: Более 300м
Каналы управления: 8-х канальный
Питание передатчика: 4 x 1.5V AA батареи
Питание коптера: LI-PO батарея 3s 2700 mah
Время зарядки: 120 минут
Полетное время: 8-15 минут
Вес: 0.980 kg
Размер квадрокоптера (L x W x H). 36 x 36 x 20 cm
Комплектация: 1 x CX-20 Коптер, 1 x Передатчик, 1 x Зарядка, 1 x батарея, 1 х подвес для Gopro, 1 х ключ для винтов
Ценник в районе 250$ с доставкой, все что идет в комплекте перечислено в шапке. =)
как раз сейчас смотрю сейчас такой коптер. смущает отсутствие FPV - можно ли докупить и если да то можно ли ссылки в студию? иначе как мониторить куда летим? Есть вариант как бы использовать вай-фай (у меня SJ4000) но он слабый - на 50 метров максимум если хватит. Еще хочу докупить гидростабилизатор. И также аккумулятор огорчает на 10 минут полета..с подвесом наверное и того меньше? в общем иногда печалюсь и подумываю все-таки поднапрячься и взять walkera.
Бюджет - хочу уложить в 400-450 баксов но взять клевую леталку для снятия бюджетных полупроф. клипов со стабилизацией изображения.
Мож у кого какие мысли или дельные советы на этот счет? Буду раз полезной инфе
Сообщение отредактировал alex_mercy - 25.05.2015, 19:02
Докупить можно что угодно, а именно для этой модели это проще всего сделать, так как тут стоят вполне взрослые мозги apm (arducopter). Можно поставить подвес на бк моторах (2 или 3 осевой), fpv, osd (технические параметры полета на экране монитора) и конечно же усиленный аккумулятор. Я планирую снять серию видео по этой модели - если интересно - задавайте вопросы)
1 и 2 видео в шапке.
А валкера хороша спору нет. Но с фпв она стоит 800-900$
krava33,
Спасибо за видосы, очень грамотно и понятно! Теперь вопросы (надеюсь сделаешь обзоры с FPV и двухосевым стабилизатором еще, но пока в ожидании - спрошу так):
Ввиду того что на сайтах типо bggood, aliexpress, gearbest и т.п. НЕРЕАЛЬНАЯ МАССА инфы по самым разным моделям подвесов, FPV передатчикам и приемникам и т.д. и т.п. я просто тупо теряюсь. Собственно что надо: чтобы аппарат летал хотя бы 10 минут с гидростаб. подвесом и FPV, чтобы к пульту я мог прикрепить смартфон (я правильно понимаю что если есть FPV-приемник то с нужным софтом я могу полет мониторить с экрана телефона?). В общем я буду благодарен за ссылки на все нужные мне детали: подвес, FPV приемник и передатчик, батарею большей емкости чем штатная (естественно чтобы она подходила) ну и что еще нужно даж не знаю. желательно уложиться в бюджет 400-450 евро. Да, камера у меня SJ4000 wi-fi (но слабый вай-фай так что использовать его не вариант) так что нужно чтобы крепления гидростаб. к нему подходили
Спасибо!
Сообщение отредактировал alex_mercy - 26.05.2015, 14:45
Обязательно сделаю еще 3-4 видео по сборке фпв комплекта на базе этого квада) Только не пойму -- что такое гидростабилизатор? Там же нет воды ;)
Для фпв - нужен комплект передатчика и приемника с экраном, на телефон никак не будет транслировать, так как видео будет передаваться на частоте 5.8 ггц. Подробнее покажу в видео)
krava33,
вас случайно нет на форуме http://forum.rcdesign.ru/ в ветке про cheerson? там бытует мнение что данный коптер плохо потянет все эти подвесы с fpv и быстро посадит батарею. с нетерпением буду ждать дальнейших видео
alex_mercy,
Есть он там.
А что есть быстро? К Вашему вниманию всемогущий ютуб, там полно роликом с полетами на этом коптере с подвесами. Можно так и оценивать примерное время по длине роликов.
krava33 @ 26.05.2015, 19:27
телефон никак не будет транслировать, так как видео будет передаваться на частоте 5.8 ггц.
У меня и телефон и планшет сидят в инете по вафле на 5,8 ГГц :)
JIexa3v @ 27.05.2015, 07:08
У меня и телефон и планшет сидят в инете по вафле на 5,8 ГГц
Это немного разные частоты) Да и экшн камеры используют только 2.4 для передачи, в нашем случае на 5.8 идет аналоговый сигнал, с помехами но без задержек. А там цифра - чистая (в основном) но с задержками.
Подвес тянет еще как) Время работы минут 8 на родной батарее. Это нормально :rolleyes:
alex_mercy,
мне бы минут 15 с подвесом хотя бы. может туда как-то можно впендюрить батарею на 5000 мА? не нашлись еще народные умельцы. )
Сами являетесь обладателем предмета беседы?
5000 поставить можно, требуется мод корпуса или его замена. Но это не даст 15 минут с подвесом. а вообще с легким волне может быть. ;)




















Cheerson CX-20 - квадрокоптер 350-го размера с функциями GPS, такими как удержание позиции, возврат домой, полёт по маршруту. В магазине tinydeal.com продаётся также под названием CXHobby CX-20 (вероятно, первоначальное название, если этот сайт принять за сайт производителя).


В Хоббикинге продаётся под названием Quanum Nova. Причём, от Cheerson CX-20 есть отличия не только в надписях,актуально для первых моделей 2014 года выпуска и начала 2015. Немного доработана конструкция коптера: на нижнюю грань корпуса выведен USB-порт и можно подключать полётный контроллер к компьютеру для обновления ПО, настройки или установки полётного задания по точкам - не вскрывая корпуса.С середины 2015 года, все коптеры не имеют отличий кроме названия, можно брать любой.
Особенности [править ]Имеет внешний съёмный крепёж с виброразвязкой для лёгкой камеры типа GoPro.
IOC (Intelligent Orientation Control) – интеллектуальный контроль ориентации MX-автопилота определяет направление «вперёд» следующим образом: в режиме «course lock flying» направление вперёд совпадет с направлением носа коптера, в режиме «home lock flying» направление вперед – от текущего положения к точке взлета.
Когда пропадает радиосвязь между контроллером и передатчиком, выходные сигналы с контроллера становятся в соответствии со средним положениям стиков. Если при этом GPS-сигнал достаточно сильный, то автоматически запустится возврат домой.
Характеристики [править ]В настоящее время в продаже можно встретить любую из этих версий.
Наглядный список различий:
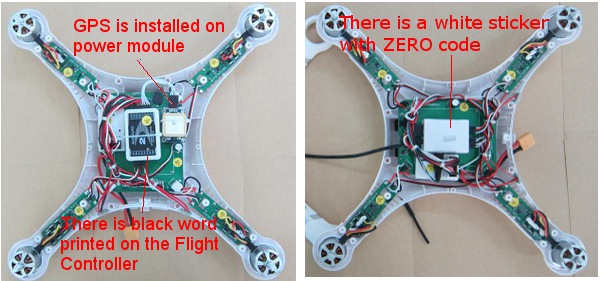
GPS-модуль в OpenSource-версии расположен внутри корпуса, в ZERO-версии - снаружи, в отдельной «антенне».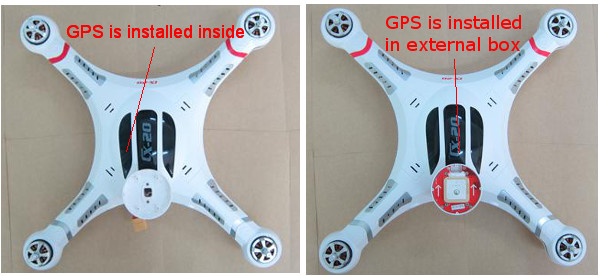
Отличается внешний вид полётного контроллера. В OpenSource-версии контроллер сверху имеет название и надписи у разъёмов, в ZERO-версии - без надписей, но есть стикер с кодом ZERO.

Общий вид Quanum Nova
Полётный контроллер [править ]Полётный контроллер представляет собой бутерброд из двух плат. На верхней расположены датчики: Invensense MPU-6000 (акселерометр и гироскоп в одном корпусе) и барометр Meas-spec MS5611 (для измерения высоты и удержания CX-20 на этой высоте). На нижней плате - микроконтроллеры ATmega2560 (основной контроллер) и ATmega32U2 (отвечает за USB-интерфейс, PPM-энкодер ), EEPROM-память AT28C256 и TXB0104 (согласователь логических уровней между датчиками, которые питаются от 3.3 Вольт и контроллером, которому нужно 5 В).

Полётный контроллер, GPS-модуль, приёмник - виброизолированы


Верхняя плата полётного контроллера OpenSource-версии

Нижняя плата полётного контроллера OpenSource-версии

Коммутация платы полётного контроллера OpenSource-версии

Коммутация платы полётного контроллера OpenSource-версии



Плата полётного контроллера ZERO-версии
Прочие комплектующие [править ]

Регулятор оборотов со стороны светодиодов БАНО


На нижней стороне мотора надпись Constar - название производителя




Понижающий преобразователь MP1593 на распредплате.

Микроконтроллер STM8S003F3. управляющий зуммером (пищалкой) и БАНО

Внутри пульта радиоуправления

Плата штатного зарядного устройства

Штатное крепление камеры типа GoPro
Режимы полёта [править ]Переключение полетных режимов CX-20
Возврат в точку взлета
Ручной режим [править ]Он же полуавтоматический, он же Stabilize Mode, он же Take-Off Mode (т.к. рекомендуется к использованию при взлёте и посадке). Управление весьма резкое для новичка.
Для стабилизации CX-20 в этом режиме используется только датчик Invensense MPU-6000 (акселерометр и гироскоп в одном корпусе) и барометр Meas-spec MS5611 (для измерения высоты и удержания CX-20 на этой самой высоте), а также магнитометр HMC5883L.
Удержание позиции [править ]GPS Mode - в работу включается GPS-модуль и CX-20 старается удерживать позицию с отклонением не более +/-0.5 м. На движение стиков CX-20 реагирует с запозданием, а углы крена и тангажа ограничены 15-20°, из-за чего значительно снижается скорость полета.
Не рекомендуется для городских полетов! Отражённые от зданий сигналы GPS-спутников могут внести большую погрешность в определении позиции и заставить коптер полететь в неожиданном направлении.
Удержание высоты [править ]Altitude Hold Mode. Этот режим можно включать после взлёта в ручном режиме до некоторой высоты. Когда стик газа в центре — CX-20 держит высоту самостоятельно, при этом за пилотом остается возможность контролировать набор высоты или снижение соответствующим движением стика газа, а также перемещать коптер в стороны на зафиксированной высоте, а также вращать его. Этот режим можно использовать для обучения полёту в ручном режиме (на каком-то этапе обучения следует отказаться от режима удержания высоты), а также просто для комфортного полёта, например, FPV.
Виртуальное направление [править ]Orientation Mode. В каком положении будет включен этот режим - там и будет у CX-20 виртуальный «нос», неважно как будет повёрнут коптер. При выключении Orientation Mode лучше оказаться позади квадрокоптера, иначе управление инвертируется.
Такой режим может упростить управление CX-20 для новичков, если включить его носом «от себя»: можно летать не заботясь о направлении коптера: движение правого стика (mode 2) «от себя» будет в любом случае означать движение коптера «от себя» и т.д. В некоторых случаях такой режим может быть полезным, но в целом это бесполезная и даже вредная практика, т.к. при нештатных ситуациях лучше обладать навыками управления полностью ручного управления
Возврат «домой» [править ]Return Home Mode. CX-20 сам поднимется (или опустится) на высоту 20 метров и вернётся в точку взлёта (там, где включалось питание), ожидая дальнейших действий со стороны пилота. Для отмены RTH необходимо перевести переключатель SWA в позицию «0», затем в «1» и снова в «0». Важно после включения коптера дождаться постоянного свечения зеленого светодиода (что сигнализирует об обнаружении необходимого количества спутников GPS), иначе при задействовании режима Return Home Mode коптер CX-20 может улететь в неопределённую точку.
Недостатки [править ]

Уязвимые для перелома места у ножек
3.3В на банку) моторы остановятся и CX-20 упадёт. То есть защиты по питанию на самом деле нет, и это неудивительно, если знать, что мониторингом напряжения на аккумуляторе занимается отдельный микроконтроллер STM8S003F3. не связанный с полётным контроллером, а управляющий напрямую зуммером (пищалкой) и БАНО. Но защиту от переразряда аккумуляторов можно сделать самому. спаяв делитель на двух резисторах с аккумулятора на вход микроконтроллера.
Обязательно выполнять при первом полёте и каждый раз при полёте не в том месте, где был полёт в прошлый раз.
Также желательно проверить (осторожно - винты!) в Mission Planner под нагрузкой на правильность/стабильность показаний. Задача - чтобы в Mission Planner север и другие стороны света совпадали с фактическими. Правильней калибровать именно под нагрузкой (с запуском моторов). Старайтесь минимизировать влияние магнитных помех (проводите калибровку вдали от электросетей, зданий, автомобилей и любых других устройств, генерирующих магнитные поля).
Калибровка гироскопов [править ]Следует выполнить калибровку гироскопов если коптер в ручном режиме полёта сносит даже при отсутствии ветра
То есть перед первым полётом или после пробных полётов (чтобы убедиться в работоспособности аппарата), но перед регулярным использованием.
На случай, если после изменения настроек коптер будет вести себя неадекватно по непонятной причине, существуют файлы с сохранёнными настройками по умолчанию. Оригинальные настройки Quanum Nova для загрузки в Mission Planner. Ещё (Cheerson CX-20 RTF, ArduCopter V3.1.2, куплен 20.06.2015 на banggood.com)
Настройка FailSafe [править ]Первым делом сохраните настройки, на всякий случай.
Если случилась потеря связи с передатчиком, то во время возврата коптера «домой» она, вероятно, может восстановиться и можно перехватить управление коптером вновь. Для этого нужно перевести переключатель SWA в позицию "0", затем в "1" и снова в "0". После этого коптер снова станет управляемым в ручном режиме.
ВНИМАНИЕ! Процедура перехвата не сработает если пульт управления был отключен и снова включен. В этом случае управление восстановится только после отключения и включения питание на коптера. Таким образом, при срабатывании FailSafe ни в коем случае не выключайте пульт!
ВНИМАНИЕ! Убедитесь в том, что перед перехватом управления стик газа находится в средней позиции или чуть выше! Если газ будет в нижней позиции — коптер упадет!
Первый запуск [править ]
Расположение антенн для лучшего приёма

Схема разводки проводов Cheerson CX-20

FlightTool - приложение для настройки ZERO-версии Cheerson CX-20

Подключение телеметрии и OSD
Так как полётный контроллер является ни чем иным как ArduPilot Mega. то После обновления прошивки на APM становятся доступны все богатые возможности этого контроллера при подключении его через USB к компьютеру с установленной на ней программой MissionPlanner. например, полёт по точкам. Смотрите по аналогии использование контроллера DEVO-M - практически всё актуально и для Cheerson CX-20.
Примечание 1. Quanum Nova с Хоббикинга без проблем определяется в МissionРlanner как ArduCopter V3.1.2.
Примечание 2. После обновления прошивки на APM также возможно подключение телеметрии и OSD. При этом штатный порт телеметрии перестает работать, но есть решение - припаяться к резисторам у контроллера (обсуждения на RCDesign и RCGroups ).

Вынужденная подпайка к резисторам вместо использования порта телеметрии.

Расположение места подпайки на плате.
Примечание 3. ZERO-версия Cheerson CX-20 поставляется с другим полётным контроллером на другом чипе AMR STM32F103 RBT6. который нельзя подключить к MissionPlanner. Вместо этого существует ПО для настройки источник (включая обновлённую прошивку) для настройки ZERO-версии, но с возможностями несравнимо меньшими, чем у OpenSource-версии: доступно всего несколько параметров, большинство из которых относится к PID-регулированию.
Тюнинг [править ]
Широко стоящие ножки

Шасси для случая установки бесколлекторного подвеса
Снизу и сверху лучей квадрокоптера расположены бортовые навигационные огни. Передние огни - красные, задние - зелёные. В ярких солнечный день их почти не видно. Если в полете эти индикаторы мигают и раздаются звуковые сигналы — значит аккумулятор почти разрядился и пора заходить на посадку.
Если смотреть на квадрокоптер сзади, то левый индикатор может мигать красным или жёлтым, а правый — зелёным.
То есть - не разблокируются моторы: взлёт невозможен. Возможные причины:
В обоих случаях, по идее, должна помочь либо калибровка стиков пульта через Mission Planner. либо подстройка триммерами на пульте.
Даже если батарейки в пульте новые, или аккумуляторы полностью заряжены, пульт действительно может тревожно попискивать. На самом деле он прерывисто пищит, сообщая о том, что стик газа находится приблизительно в средней позиции (50% газа), что удобно при управлении в полуавтоматических режимах или при значительном удалении для удержания постоянной высоты полёта - не нужно смотреть на стик газа, чтобы понять его положение.
Что будет если в полёте выключится пульт? [править ]Коптер должен самостоятельно перейти в режим «возврат домой». Обязательно дожидайтесь определения координат до взлёта (постоянное свечение правого зелёного светодиода), иначе возможен улёт неизвестно куда.
Какой порядок подключения моторов? [править ]М1 - передний правый
М2 - задний левый
М3 - передний левый
М4 - задний правый
Два видеоролика - реклама и видеоинструкция. Больше там ничего нет.
Отзывы [править ]Мои полеты с Cheerson CX-20
Мое увлечение началось с того, что не смог отказать себе в удовольствии поснимать видео с высоты полета. После продолжительных поисков по подбору и отсеву кандидатов на покупку, я все же решил остановиться на Cheerson CX-20.
Как большинство начинающих я полагал что стоит только приобрести понравившийся квадролет с необходимым подвесом и прочие FPV прибамбасы, как можно отправляться снимать кино. Однако жизнь внесла свои коррективы.

Получив посылку с вожделенным квадролетом, я был восхищен ее содержимым, но все же здравый смысл заставил меня для начала внимательно проштудировать все руководства, и только через день приступить к летным испытаниям.
Через день, отдалившись от города, я достал квадрокоптер, затянул винты и произвел калибровку. Квадр летать не захотел, он только повалился на бок. Я снова произвел калибровку, результат оказался прежним. Еще немного попарившись удрученный, я возвратился домой.
Итог поездки воодушевляющим назвать трудно, кроме того машинка получила незначительные повреждения винтов. Оказалось, что причина произошедшего недостаток внимания с моей стороны, винты оказались установленными неправильно.
Второй этап летных испытаний прошел непосредственно во дворе дома, после того как я правильно поставил винты и произвел калибровку. Cheerson летать опять не захотел, беднягу периодически заносило в сторону.
Пораскинув мозгами, я пришел к выводу что возможно ему необходима тремировка. Чтобы избежать печальных последствий возможного падения следующий этап испытаний должен был пройти на песчаном берегу реки.
Приехал провел калибровку, запустил. Квадрокоптер приподнялся на метр от песка и его снова повело в бок. Усилия поднять квадр ровно продлились до тех пор, пока его не удалось приподнять на шесть метров, затем я заметил, что его уносит ветер.
Испугавшись возможного падения квадра в воду и реши посадить его. Причем настолько неудачно, что он лишился крышки отсека аккумулятора, сломал сверху луч и потерял “глаз”, ударившись наверно об единственный на пляже камень.

В итоге я решил, что проблема находится где-то в ином месте. Почитав тематический форум, я решил установить Mission Planner и пере калибровать акселератор. Результат оказался все тем же - заваленный на десять градусов горизонт.

Причину удалось установить после вскрытия корпуса, полетный контроллер был установлен весьма коряво.


Вклеив контроллер заново и очистив моторчики от песка, я решил подлатать корпус. На рынке был приобретён набор из тестера, клея, паяльника и флюса с припоем. Поскольку специалист по пайке чего-либо из меня прямо скажем посредственный, то паяльником только оплавлял края пластика, заделывая трещины квадрокоптера. Мои старания увенчались успехом, аппарат вновь был готов к полетам.
Поставив его по центру двора, откалибровал и чудо! Коптер полетел, правда как-то странно. Периодически его сносит на в правую сторону и разворачивает носом влево, в ручном режиме стоять не хочет. По причине отсутствия должного опыта и необычного поведения я несколько раз уронил квадр, так что у него в итоге сломалась ножка.
Подклеив ножку, я вновь поднял квадр, но высоко поднимал поднимать не стал, а удерживал в сантиметрах пятнадцати от земли, чтобы попривыкнуть к управлению.
Попривыкнув, я дал в половину газа и тут квадрик завращался и не совладав с управлением я ударил его об стену на высоте трех метров. Как следствие сломанный пополам пропеллер и сломанный сверху луч. Вновь притупил к поиску первопричины анормального поведения квадра. Как мне думается дело в следующем.
На половинном газу моторы вращаются с одинаковой частотой, при крене частота меняется, но на прежние 50% они не устанавливаются. В чем загвоздка, в контроллерах либо программе? Позднее оказалось, что существуют такие характеристики как PID, определяющие действия полетного контроллера. Разобравшись в настройках PID мне удалось установить более корректные значения, при которых квадрик стал летать устойчивее.
Следующим моим испытаниям помешало вывешенное кем-то белье, недолго полетав квадр за него зацепился в итоге падение с высоты два метра и треснутая нога. Подклеив ногу, я отправился за город, откалибровал и вновь запустил свой квадр. Аппартик поднялся на метр, завис, и как только я наклонил стик сорвался в штопор и упал! Я было подумал на новые винты от DJi которые задели корпус, но дело оказалось в моторе.
Удрученный новой аварией возвратился домой, полетать в очередной раз не довелось. Принял решение разобраться почему так вышло. Двигатель останавливался при крене, почему? При чем явственно услышал хруст. После того как этот хруст продолжался достаточно долго, от моторчика потянуло паленым маслом, и он прекратил нормально работать. Хотел выяснить мотор ли это или ESC контроллеры. Перепаяли совместно с специалистом, прикрутили, тоже самое-двигатель, без сомнений.
Недавно заказал новый моторчик, а заодно защиту для винтов. Когда заказ придёт вновь продолжу осваивать квадрик. Авось новых проблем не будет.