




 Рейтинг: 4.4/5.0 (1920 проголосовавших)
Рейтинг: 4.4/5.0 (1920 проголосовавших)Категория: Инструкции
Руководство юзера LEGO MINDSTORMS EV3. Всш на российском языке о ботах LEGO MINDSTORMS EV3 и NXT: разные аннотации к конструкторам различных версий, скриншоты готовых моделей, информация о версиях, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые аннотации по созданию и программированию различных видов ботов лего из конструктора версии 8547. Мы советуем приступать к сборке этих моделей, как для тебя удалось собрать 2-3 бота из основной серии, опосля того. На базе авто - мототехники. NXT бонусные статьи и аннотации. Боты были сделаны самыми преданными поклонниками; они могут стать источником новейшего необычного опыта в сборе и программировании. Планируем добавить всю нужную для роботехника - любителя информацию. Печатная аннотация по сборке для TRACK3R для получения всех инструкций по сборке в формате PDF перейдите в раздел собери бота. Кибернетика, сапр, сау, увтс. Отзыв о продукции - английски. Сохраняет точность, но приобретенные в итоге компактность и скорость реакции сказываются на мощности. Инструкций LEGO NXT. Порта ввода: 4 для подключения датчиков к кубику EV3.4 порта выхода: D для подключения датчиков к кубику EV3.1 мини USB PC порт для подключения кубика EV3 к компу. Автоматизация и автоматика производственных действий. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Представляет собой полное управление, описывающее все детали набора для сборки ботов LEGO MINDSTORMS и порядок функционирования ботов EV3. Всш будет доступно постоянно и безвозмездно. Дозволяет боту реагировать на касания, щелчок и освобождение, распознает три ситуации: прикосновение. Станки и оборудование с чпу. Свяжитесь с нами - английски. Информационные системы и технологии. Рефераты по информатике и икт. USB хост - порт для подключения - Fi - адаптера, организации поочередного опроса; микро - SD Card порт для роста размера доступной память кубика EV3. Боты и роботехнические системы. Механические и мехатронные изделия.
Лего роботы инструкцииЛего роботы инструкции

Группа: Пользователь
Сообщений: 6
Регистрация: 09.03.2013
Пользователь №: 15644
Спасибо сказали: 2 раз(а)
Фармакологический справочник включает информацию о составе и форме выпуска, показаниях к применению, противопоказаниях, фармакологическом действии, содействии фармацевтических средств, лекарственных компаниях, методе внедрения фармацевтических препаратов, побочных действиях. Справочник фармацевтических препаратов предоставляет юзерам доступ к инструкциям, бадов, мед устройств и остальных продуктов, ценам и описаниям фармацевтических средств, мед изделий. Кальция глюконат - лект. Метод внедрения и дозы.
30.01.2016, 23:43
автор: Tallos
Сервисы депозитарного учреждения по обслуживанию обращения ндс - овгз. Продажа юбилейных и памятных монет. Банковские сплавы и вкладывательные монеты.




















Базовый набор LEGO MINDSTORMS Education EV3 артикул 45544. Описание конструктора Lego Mindstorms EV3. NXT бонусные статьи и аннотации. Артикул набора 8547, время сборки 4 часа 2 человека в группе. Рефераты по информатике и икт. * я считаю самым современным и удачным набором версию 8547. Наружный вид коробки и управление юзера к конструкторам LEGO Mindstorm NXT версий 8527, 8547 и 9797. Всё будет доступно постоянно и безвозмездно. Версия набора - домашняя. Также мы выкладываем пошаговые аннотации по созданию и программированию различных видов ботов лего из конструктора версии 8547. Инструкций LEGO NXT. На базе авто - мототехники. Имеются две модификации: HOME и EDUCATIONS домашняя и образовательные версии. Автоматизация и автоматика производственных действий. Её и рекомендую брать. Станки и оборудование с чпу. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Всё на российском языке о ботах LEGO MINDSTORMS EV3 и NXT: разные аннотации к конструкторам различных версий, скриншоты готовых моделей, фото и видео занятий по робототехнике, информация о версиях. Домашняя попроще и подешевле, естественно, подороже, а образовательная версия с лицензионным по LABVIEW для рабочей группы от NATIONAL INSTRUMENS. Приобрести в красноярске можно в фирме ооо позитив плюс либо системные решения. Любая версия имеет свои индивидуальности. Кинофильмов про ботов. Кибернетика, сау, сапр, увтс. Промышленные боты и установки. На первой страничке мы с вами познакомимся с наружным видом конструкторов lego mindstoms nxt, ev3 и инструкциями lego на российском языке для их. Разница в версиях описана в данной для нас статье. На данный момент начинаем выкладывать статьи с готовыми пошаговыми инструкциямипо сборке разных моделей ботов из конструктора версии 8547 robot lego mindstorms nxt 2.0. Планируем добавить всю нужную для роботехника - любителя информацию. Доставят быстро и без хлопот и морок. Рекомендуемый возраст малышей - 12-14 лет. В зеленогорске красноярский край доставить бота может компания компас. Скачивайте, ознакамливайтесь, опции и программирования новейшей модели от лего, наружным видом и методом соединения. Механические и мехатронные изделия. Собираем и программируем бот - джип. Аннотация на российском языке для lego mindstorms ev3. Ежели вы задумываетесь о покупке LEGO MINDSTORMS, то знайте что новейший набор в несколько раз круче предыдущего.
Лего инструкции по сборке роботовЛего инструкции по сборке роботов

Группа: Пользователь
Сообщений: 8
Регистрация: 20.03.2013
Пользователь №: 17314
Спасибо сказали: 3 раз(а)
лего инструкции по сборке роботов
Идея создания данного робота Mindstorms родилась в Массачусетском технологическом институте, но очень скоро стала достоянием огромного количества школ и других учебных заведений в качестве наглядного обучающего материала. Как думаете, почему? Вот краткие аргументы. Когда ваш ребенок с помощью lego Mindstorms nxt с увлечением занят изобретением чего-то нового, интересного, да еще и подвластного только ему - поверьте, что это весьма занятная картина. Как говорится: для наших детей достаточно хорошим является только лучшее.
Это новое NXT-поколение конструируемых программируемых роботов! Благодаря новым базовым моделям, расширенным возможностям программирования и новому датчику распознавания цвета, новый LEGO MINDSTORMS NXT еще лучше предыдущей модели! Конструктор LEGO MINDSTORMS NXT 2.0 объединяет в себе неограниченные возможности конструирования модели (благодаря универсальности лего-элементов), интеллектуальный микрокомпьютер и интуитивное программное обеспечение, поддерживающее технологию drag-and-drop. Новый комплект NXT 2.0 содержит всё, что вам потребуется для создания своего первого робота всего за 30 минут, а также десятки тысяч новых роботизированных систем, которые будут делать то, что вы захотите!
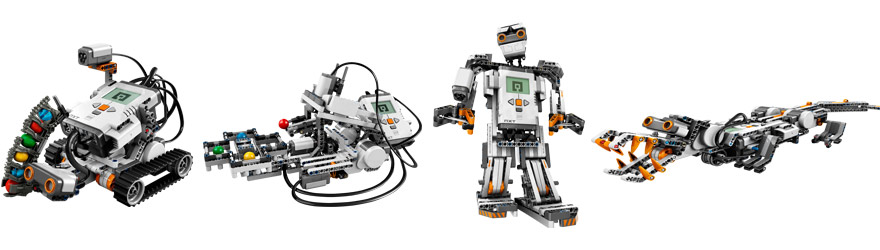
В комплекте к Лего Майндстормс 2.0 идут инструкции по сборке, 4 моделей роботов - это новая версия робота - "Альфа" Рекс, Robocator - крокодил, Shooter - робот, который стреляет шариками, и робот - сортировщик шариков по цвету.
ТАКИХ РОБОТОВ МЫ БУДЕМ СОБИРАТЬ:Вот так выглядит коробка от набора Lego Mindstorms 2.0, на ней изображен робот Андроид(человеко-подобный робот), умеет передвигаться на двух ногах, танцевать, разговаривать, инструкция по сборке прилагается.

Модель робота - "Гонка", ее задача передвигаться очень быстро, совершая при этом повороты, маневры, объезды препятствий

Робот крокодил. Реагируя на движение, начинает реально больно кусаться, идти вперед походкой настоящего крокодила и при этом виляет хвостом! Очень интересная модель!
Обычная модель, учимся собирать и применять флюгерное колесо. Задача этого робота: проехать четко по кругу черной линии при помощи датчика цвета. Не так уж легко это сделать, как звучит на словах. )

Робот "Менделеев", делали его для всероссийского конкурса "Робототехники". Сверху робот хранит 12шт теннисных мячей, проезжая препятствия в виде квадратов с бортиками 3см. и при виде красного объекта он должен сбросить 2 шарика в коробку, при виде синего 1, а при виде белого просто проехать мимо!

Тоже робот для конкурса, его задачей было проехать лабиринт, не запутаться и не выехать за пределы доски, при этом робот в своих "щупальщах" перевозит колбу определенного цвета, а затем выставляет их все в кружки по цветам: синий на синий, красный на красный итд. Модель и механизмы держателя колб ребята продумывают сами!

Игра "Пинтбол", собрали ребятишки 8-9 лет!

Сборка робота богомола по схеме. Данный робот реагирует на движение и начинает идти вперед махая крыльями, поднимая голову

Робот самолет, был на пульте управления. Данную модель разработал Янин Пётр 7 лет из ДДиЮ Факел, он занял 1 место в творческом конкурсе по г. Томску, по робототехнике. Он реализовал свой проект, провел его презентацию и ответил на все сложнейшие вопросы судей, молодец!

А также мы будем моделировать и конструировать различные модели роботов, их очень много у меня! И в зависимости от модели будем программировать на выполнение определенных действий! Приходите к нам!
Теги: Кружок лего в томске. Кружок по роботам в томске. Lego mindstorms в томске. Робототехника в Томске. Роботы Томск. Кружок роботов Томск. Курсы по роботам. Детский кружок по роботам. Роботы детям Томск. Кружок для детей робототехника. Робототехника в школе. Роботы в Томске. Программируемые роботы. Кружок программирования. Кружок программирования в томске. Кружок для юного программиста. Факел роботы. Отзывы о роботах в томске. Программирование в Томске. Кружок по роботам Томск. Стоимость кружка роботов. Роботы цена. Лего роботы стоимость.Очень взрослая игрушка для детей. Процесс сборки модели станет отличным занятием для вашего ребенка, и доставит ещё больше удовольствия играя во время игры.
Обои · Инструкции по сборке · Комиксы · Постеры. Инструкции по инструкция · недостающие элементы · свяжитесь с нами · отзыв продукции · О нас.
Эти роботы дадут тебе возможность в полной мере познакомиться с серией EV3. С ними в комплекте идут инструкция по сборке, задания для.
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно! На первой странице мы с Вами познакомимся с внешним видом конструкторов lego mindstoms nxt / ev3 и инструкциями (інструкциї lego) на русском языке для них. Сейчас начинаем выкладывать статьи с готовыми пошаговыми инструкциями по сборке различных моделей роботов из конструктора версии 8547 (robot lego mindstorms nxt 2.0). Внешний вид конструктора LEGO Mindstorm EV3 версии 31313 и 45544: Описание конструктора Lego Mindstorms EV3 Инструкция на русском языке для lego mindstorms ev3. Версия набора - домашняя. Артикул 31313. Базовый набор LEGO MINDSTORMS Education EV3 (артикул 45544). Версия набора - образовательная (для школ). C 2013 года в продаже доступны новые наборы по цене от 350$ до 550$ (12000 -18000 рублей)! Если Вы задумываетесь о покупке LEGO MINDSTORMS, то знайте что новый набор в несколько раз "круче" предыдущего! Имеются две модификации: HOME и EDUCATIONS (Домашняя и образовательные версии). Каждая версия имеет свои особенности. Домашняя попроще и подешевле, а образовательная версия с лицензионным ПО LABVIEW для рабочей группы от NATIONAL INSTRUMENS, естественно, подороже. Скачивайте, ознакамливайтесь с ПО, внешним видом и способом соединения, настройки и программирования новой модели от лего! Инструкция по сборке робота АЛЬФАРЕКСа (артикул набора 8547) Время сборки 4 часа (2 человека в группе). Рекомендуемый возраст детей - 12-14 лет Робот крокодил Робот - крокодил (робогатор) Робот пятиминутка Бот-внедорожник Трёхколёсный бот Конструируем робота "Пятиминутку" за 5 минут ;-) Собираем и программируем Бот-внедорожник. Это уже более серьёзная модель, использующая датчик касания. Создаём и тестируем Трёхколёсного бота. У этого робота ещё нет датчиков, но уже можно писать средние по сложности программы для управления двумя серводвигателями. Линейный ползун Исследователь Нападающий коготь Добавляем к "роботу пятиминутке" датчик цвета и получаем из робота пятиминутки настоящего "Линейного ползуна" и получаем робот с ИИ начального уровня! Всем хорош "Бот-внедорожник": манёвренный, бронированный, умный. Ему бы ещё ультра-зрение бы добавить. Добавляем! Встречайте: Исследователь - вот вам робот с искусственным интеллектом среднего уровня! Хищный атакующий робот, содержащий коготь, которым он может ударить по цели. Собираем, тестируем! МАНТИ - застенчевый богомол Шарикопульт Робот-база с тремя двигателями Удивительное существо: робот-богомол. Постройте, загрузите базовую программу, порадутесь и погрустите вместе с МАНТИ! Интересный миниробот под названием "Шарикопульт" очень простой, но может быть использован как дополнение к любому другому роботу. Базовый робот с тремя двигателями может пригодиться для получения навыков строительства собственных блоков. Так как в базовом роботе нет ни датчиков, ни спец.механизмов. Вы все это можете сделать сами! Двух кнопочный пульт ДУ Продвинутый Молот-автобот Простой светомер из лего В данном уроке можно научиться собирать двух кнопочный пульт дистанционного управления любым роботом, собранным из конструктора лего миндстормз! Новенький проект "Молот-автобот"- это сложный в сборке и программировании робот. Но итоговая модель автомобиля-робота с молотом позволяет использовать 3 двигателя и 2 датчика! Эксперименты с данным светомером позволят научиться использовать датчик света в своих роботах. Робот СЕГВЭЙ с наездником Измеряем растояние длиномером автобот: гоночная машина из лего Даже робота СЕГВЭЙ (SEGWAY) можно построить из набора 8547. Инструкция доступна по клику на картинку. Простейшее дополнение к роботу позволяет измерять пройденное им растояние. В статье описано как создать очень удобного робота-длиномера из робота пятиминутки. Замечательная разработка! Автомобиль, да ещё какой! Есть возможность и удалённого управления, и "мозги", позволяющие принимать решения, считывая цветные линии на полу! Можно скачать - это АВТОБОТ! Пятикнопочный пульт ДУ Супер пульт ДУ Миниавто с 3-х пультом ДУ Пульт ДУ можно использовать практически в любом своём проекте. Единственное требование - наличие двух конструкторов lego mindstorms nxt 2.0 Супер пульт ДУ то уже мега-навороченный вариант для управления гоночным автомобилием или любым другим роботом MINDSTORMS NXT! Забавная игрушка - миниавтомобильчик с трёх кнопочным пультом дистанционного управления
Robotics: Ищешь как собрать LEGO робота? ЗАХОДИ! Пошаговые инструкции с фото и видео по сборке роботов из наборов Lego.
Микросхема драйвера управления двигателями L293D. Принцип работы и использование.
Простейший робот на одной микросхеме. Схема и описание. Робот движется на свет, бежит за рукой или следует по линии.
Простой робот с логической микросхемой.
Робот, следующий по линии, с логическим элементом "НЕ".
Часть 2 [микроконтроллеры]
Что такое микроконтроллер.
Назначение и применение. Классификация микроконтроллеров.
Микроконтроллеры: краткий обзор.
Первый микроконтроллер. Закон Мура. Семейства микроконтроллеров. Atmel AVR.
Устройство микроконтроллера AVR.
Архитектура микроконтроллеров AVR. Процессор, память программ, память данных, оперативная память, порты ввода/вывода, прерывания, интерфейсы.
Таблица моделей микроконтроллеров AVR. Типы корпусов микросхем.
Языки программирования для микроконтроллеров AVR. WinAVR.
Среда разработки WinAVR.
Состав. Версии. Где скачать WinAVR. Установка.
Makefile и компиляция программы.
Создание файла Makefile. Компиляция программы для микроконтроллера.
Простой программатор AVR. AVRDUDE.
Загрузка программы в микроконтроллер. Интерфейс SPI. Схема простейшего программатора.
Первый проект на микроконтроллере.
Схема и описание для начинающих.
Часть 3 [программирование]
Язык программирования Си: введение.
Структура программы на языке C (Си). Использование комментариев.
Типы переменных. Присваивание.
Управление портами микроконтроллера AVR.
Регистры DDRx и PORTx. Побитные операции. Представление чисел.
Простой робот на микроконтроллере AVR
Часть 1. Управляем моторами.
Схема робота. Примеры программ.
Часть 2. Робот с фотодатчиком.
Схема фотодатчика. Программа для следования по линии.
Часть 3. Робот для соревнований.
Конструкция робота и программа для соревнований Кегельринг.

Компания Samsung представила новый одноплатный компьютер Artik 10, являющийся конкурентом популярного мини-компьютера Raspberry Pi 3.
10.04.2016
Чилла Ари из Университета Южной Флориды использовала "зеркальный тест" для проверки наличия самосознания у морских скатов.
07.04.2016
Крейг Вентер, создал микроба с минимальным для клеточной формы геномом. Количество генов было уменьшено до минимально необходимого набора, который способен обеспечить жизнь клетки.
07.04.2016
Известный британский учёный-кибернетик Кевин Уорвик представил новую разработку - биоробота Гордона.
21.03.2016
В дни праздника День защитника Отечества в СК «Олимпийский» развернется настоящая битва боевых роботов. Бои роботов «БРОНЕБОТ» созданы по мотивам первых культовых мировых шоу 90-х. 

17.11.2015
Самый красивый робототехник и финансисты надеются, что Jibo займет ключевое место в наших домах, возвещая наступление эры роботов. А компания Jibo Inc. явно претендует на место Apple в робототехнике.
17.11.2015
Kiva Systems предложила сделать складские полки-стеллажи мобильными для того, чтобы в случае необходимости полка могла сама подъезжать к работнику склада.
13.11.2015
Kinetis KW41Z может стать основой для достаточно простого превращения множества устройств в умные компоненты интернета вещей, управляемых по BLE, а также объединять эти устройства в сеть.
13.11.2015
На данный момент ведутся работы по испытаниям уменьшенной копии аппарата. Сам ровер и испытательный полигон находятся на территории Франции, а управление ведется из центра на территории Нидерландов.
13.11.2015
После механической поломки Юйту находится на Луне без движения, но продолжает собирать научную информацию и отправлять ее на Землю.
10.11.2015
Многочисленные измерения позволили научить будущий экзоскелет не просто двигаться в соответствии с жесткой программой, а подстраиваться под походку и особенности каждого отдельного человека.
09.11.2015
Робот Нерехта выполнен по модульной схеме, на его платформе можно создать разведывательную машину, машину для корректировки или ведения огня, вспомогательное транспортное средство.
09.11.2015
Наномашина техасских ученых умеет самостоятельно двигаться даже по неровным поверхностям, которые могут являться, например, оболочками клеток и других объектов микромира.
Новости о роботах и робототехнике
GOTO
Программа разработана как самостоятельная дисциплина, являющаяся образовательным компонентом общего среднего образования. Вместе с тем, выражая общие идеи формализации, она пронизывает содержание многих других предметов и, следовательно, становится дисциплиной обобщающего, методологического плана. Основное назначение курса "Робототехники" состоит в выполнении социального заказа современного общества, направленного на подготовку подрастающего поколения к полноценной работе в условиях глобальной информатизации всех сторон общественной жизни.
Робототехника является одним из важнейших направлений научно - технического прогресса, в котором проблемы механики и новых технологий соприкасаются с проблемами искусственного интеллекта.
За последние годы успехи в робототехнике и автоматизированных системах изменили личную и деловую сферы нашей жизни. Роботы широко используются в транспорте, в исследованиях Земли и космоса, в хирургии, в военной промышленности, при проведении лабораторных исследований, в сфере безопасности, в массовом производстве промышленных товаров и товаров народного потребления. Многие устройства, принимающие решения на основе полученных от сенсоров данных, тоже можно считать роботами — таковы, например, лифты, без которых уже немыслима наша жизнь.
Содержание и структура курса «Робототехника» направлены на формирование устойчивых представлений о робототехнических устройствах как едином изделии определенного функционального назначения и с определенными техническими характеристиками.
Программа информатике представляет собой целостный документ, включающий три раздела: пояснительную записку; основное содержание с распределением учебных часов по разделам курса и требования к уровню подготовки выпускников.
Общая характеристика учебного курса
Программа рассчитана на 35 часов и адаптирована под Конструктор Mindstorms NXT 9797.
Цель образовательной программы «Лего-конструирование и робототехника» заключается в том, чтобы перевести уровень общения ребят с техникой «на ты», научить ребят грамотно выразить свою идею, спроектировать ее техническое и программное решение, реализовать ее в виде модели, способной к функционированию.
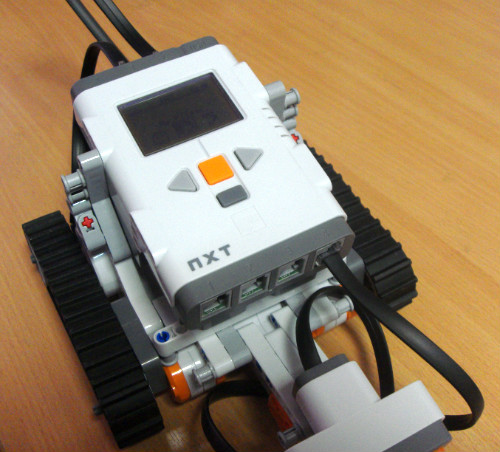
Конструктор Лего предоставляет ученикам возможность приобретать важные знания, умения и навыки в процессе создания, программирования и тестирования роботов. «Мозгом» робота L ego M indstorms Education является микрокомпьютер L ego NXT, делающий робота программируемым, интеллектуальным, способным принимать решения. Для связи между компьютером и NXT можно использовать также беспроводное соединение Bluetooth. На NXT имеется три выходных порта для подключения электромоторов или ламп, помеченные буквами А, В и С. С помощью функции NXT Program (Программы NXT) можно осуществлять прямое программирование блока NXT без обращения к компьютеру. Датчики получают информацию от микрокомпьютера N X T.
Конструктор Лего и программное обеспечение к нему предоставляет прекрасную возможность учиться ребенку на собственном опыте. Такие знания вызывают у детей желание двигаться по пути открытий и исследований, а любой признанный и оцененный успех добавляет уверенности в себе. Обучение происходит особенно успешно, когда ребенок вовлечен в процесс создания значимого и осмысленного продукта, который представляет для него интерес. Важно, что при этом ребенок сам строит свои знания, а учитель лишь консультирует его.
В окружающем нас мире очень много роботов: от лифта в вашем доме до производства автомобилей, они повсюду. Конструктор Mindstorms NXT приглашает ребят войти в увлекательный мир роботов, погрузиться в сложную среду информационных технологий.
Программное обеспечение отличается дружественным интерфейсом, позволяющим ребенку постепенно превращаться из новичка в опытного пользователя. Каждый урок - новая тема или новый проект. Модели собираются либо по технологическим картам, либо в силу фантазии детей. По мере освоения проектов проводятся соревнования роботов, созданных группами.
В конце года в творческой лаборатории группы демонстрируют возможности своих роботов.
Можно выделить следующие этапы обучения:
І этап – начальное конструирование и моделирование. Очень полезный этап, дети действуют согласно своим представлениям, и пусть они «изобретают велосипед», это их велосипед, и хорошо бы, чтобы каждый его изобрел.
На этом этапе ребята еще мало что знают из возможностей использования разных методов усовершенствования моделей, они строят так, как их видят. Задача учителя – показать, что существуют способы, позволяющие сделать модели, аналогичные детским, но быстрее, мощнее. В каждом ребенке сидит дух спортсмена, и у него возникает вопрос: «Как сделать, чтобы победила моя модель?»
Вот здесь можно начинать следующий этап.
ІІ этап – обучение. На этом этапе ребята собирают модели по схемам, стараются понять принцип соединений, чтобы в последующем использовать. В схемах представлены очень грамотные решения, которые неплохо бы даже заучить. Модели получаются одинаковые, но творчество детей позволяет отойти от стандартных моделей и при создании программ внести изменения, поэтому соревнования должны сопровождаться обсуждением изменений, внесенных детьми. Дети составляют программы и защищают свои модели. Повторений в защитах быть недолжно.
ІІІ этап – сложное конструирование. Узнав много нового на этапе обучения, ребята получают возможность применить свои знания и создавать сложные проекты.
Круг возможностей их моделей очень расширяется. Вот теперь уместны соревнования и выводы по итогам соревнований – какая модель сильнее и почему. Насколько механизмы, изобретенные человечеством, облегчают нам жизнь.
Главной целью курса является развитие информационной культуры, учебно-познавательных и поисково-исследовательских навыков, развитие интеллекта.
Возраст детей, участвующих в реализации данной образовательной программы: от 9 до 14 лет. Дети данного возраста способны выполнять задания по образцу, а так же после изучения блока темы выполнять творческое репродуктивное задание.
Место курса «Робототехника » в учебном плане МОУ СОШ с. Поима
Учебный план МОУ СОШ с. Поима предусматривает изучение робототехники в объеме 35 часов. В том числе в 5-7 классе – 35 часов, в 8-11 классе – 35 часов.
Преподавание ведется с использованием материалов книги С.А. Филиппова «Робототехника для детей и родителей» и компьютеров.
Общеучебные умения, навыки и способы деятельности
Программа предусматривает формирование у учащихся общеучебных умений и навыков, универсальных способов деятельности и ключевых компетенции. В этом направлении приоритетами для учебного предмета «Робототехника» являются: определение адекватных способов решения учебной задачи на основе заданных алгоритмов; комбинирование известных алгоритмов деятельности в ситуациях, не предполагающих стандартное применение одного из них; использование для решения познавательных и коммуникативных задач различных источников информации, включая энциклопедии, словари, Интернет-ресурсы и базы данных; владение умениями совместной деятельности (согласование и координация деятельности с другими ее участниками; объективное оценивание своего вклада в решение общих задач коллектива; учет особенностей различного ролевого поведения).
Lego позволяет учащимся:
В младшей группе 1 раз в неделю по 1 часу (итого 1 час в неделю, 35 часов в год);
В старшей группе 1 раз в неделю по 1 часу (итого 1 час в неделю, 35 часов в год).
Ожидаемые результаты освоения программы.
После завершения курса обучения:
Обучающийся будет знать:
Обучающийся будет уметь:
Основное содержание (35 часов)
КонструкторMindstormsNXT. Знакомство с набором 9797, изучение его деталей. Получение представлений о микропроцессорном блоке NXT, являющимся мозгом конструктора LEGO Mindstorms 9797. Подготовка конструктора и NXT к дальнейшей работе.
Знакомство с электронными компонентами и их использование:
Модуль NXT с батарейным блоком; датчики: ультразвуковой (датчик расстояния), касания, звука - микрофон, освещенности; соединительные кабели разной длины для подключения датчиков и сервоприводов к NXT и USB - кабели для подключения NXT к компьютеру.
Составление программ передвижения робота вперед и назад, который имеет мотор, способный изменять вращение оси машины. Робот имеет правый и левый моторы, подключенные к портам B и C. Сборка и программирование робота Mindstorms NXT, который должен двигаться вперед и поворачивать под прямым углом направо. Определение общих для всех датчиков параметров, которые надо проверить перед работой и настроить по заданным параметрам.
Тема 4.Проектно-конструкторская деятельность, 15 часов
Работа в Интернете. Поиск информации о Лего-соревнованиях, описаниях моделей, технологии сборки и программирования Лего-роботов. Сборка своих моделей. Анализ умений программирования робота. Подведение итогов курса – проведение соревнований (турниров), учебных исследовательских конференций.
Тема 5 Свободное моделирование, 3 часа
Литература для учащихся
Чехлова А. В. Якушкин П. А.«Конструкторы LEGO DAKTA в курсе информационных технологий. Введение в робототехнику». - М. ИНТ, 2001 г.
Филиппов С.А. «Робототехника для детей и родителей» - «Наука» 2010г.
Литература для учителя
Тришина С. В. Информационная компетентность как педагогическая категория [Электронный ресурс]. ИНТЕРНЕТ-ЖУРНАЛ «ЭЙДОС» –www.eidos.ru.
Поташник М.М. Управление профессиональным ростом учителя в современной школе.– М. 2009
Концепция модернизации российского образования http://www.ug.ru/02.31/t45.htm
«Новые информационные технологии для образования». Институт ЮНЕСКО по информационным технологиям в образовании. Издательство « Москва». 2000 г
Программирование трехколесного робота
Практика. Разработка программ для выполнения поставленных задачи: несколько коротких заданий. Количество блоков в программах более 5 штук. (более сложная программа). Собираем и программируем " Бот-внедорожник "
На предыдущем уроке мы собрали "Трёхколёсного" робота. Мы его оставили в ящике, на этом уроке достаём и вносим небольшие изменения в конструкцию. Получаем уже более серьёзная модель, использующую датчик касания. Соответственно, мы продолжаем эксперименты по программированию робота. Пишем программу средней сложности, которая должна позволить роботу реагировать на событие нажатия датчика. Задача примерно такая: допустим, робот ехал и упёрся в стену. Ему необходимо отъехать немножко назад, повернуть налево и затем продолжить движение прямо. Необходимо зациклить эту программу. Провести испытание поведения робота, подумать в каких случаях может пригодиться полученный результат.
Создаём и тестируем " Гусеничного робота ".
Задача: необходимо научиться собирать робота на гусеницах. Поэтому тренируемся, пробуем собрать по инструкции. Если всё получилось, то управляем роботом с сотового телефона или с компьютера. Запоминаем конструкцию. Анализируем плюсы и минусы конструкции. На следующем уроке попробуем разобрать и заново собрать робота.
Цель: Сформировать задачу на разработку проекта группе учеников.
На уроке мы делим всех учеников на группы по 2-3 человека. Шаг 1. Каждая группа сама придумывает себе проект автоматизированного устройства/установки или робота. Задача учителя направить учеников на максимально подробное описание будущих моделей, распределить обязанности по сборке, отладке, программированию будущей модели. Ученики обязаны описать данные решения в виде блок-схем, либо текстом в тетрадях. Шаг 2. При готовности описательной части проекта приступить к созданию действующей модели.
Шаг 2. При готовности описательной части проекта создам действующую модели. Если есть вопросы и проблемы - направляем учеников на поиск самостоятельного решения проблем, выработку коллективных и индивидуальных решений. Шаг 3. Уточняем параметры проекта. Дополняем его схемами, условными чертежами, добавляем описательную часть. Обновляем параметры объектов. Шаг 4. При готовности модели начинаем программирование запланированных ранее функций.
Цель: Научиться презентовать (представлять) свою деятельность. Продолжаем сборку и программирование моделей.
Шаг 5. Оформляем проект: Окончательно определяемся с названием проекта, разрабатываем презентацию для защиты проекта. Печатаем необходимое название, ФИО авторов, дополнительный материал. Шаг 6. Определяемся с речью для защиты проекта. Записываем, сохраняем, репетируем.
Цель: Научиться публично представлять свои изобретения. Публичная ЗАЩИТА проектов с приглашением представителей администрации, педагогов.
Свободный урок. Сбор готовой модели на выбор.
Сбор и исследование одной из моделей роботов на выбор:
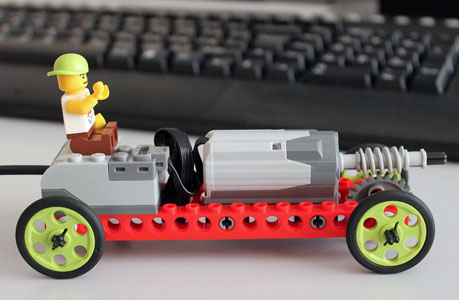
? Гоночная машина - автобот - автомобиль с возможностью удалённого управления и программирования его для движения по цветным линиям на полу!
? Бот с ультразвуковым датчиком - 4-х колёсный робот с интеллектуальной программой, принимающей решение куда ехать при наличии препятствия.
? Бот с датчиком касания - 4-х колёсный робот с программой, использующей датчик касания в качестве инструмента для определения препятствий.
? Бот с датчиком для следования по линии - робот, программа которого настроена на его движение по чёрной линии.
? Бот стрелок - простейший робот, стреляющий в разные стороны шариками. Цель: Закрепить навыки конструирования по готовым инструкциям. Изучить программы. Ученикам необходимо собрать модели по инструкции. Загрузить имеющуюся программу. Изучить работу программы, особенности движения, работы с датчиком и т.д. модели робота. Сделать соответствующие выводы.
Цель: собрать по инструкции робота, изучить его возможности и программу.
Собираем робота по инструкции, загружаем программу, изучаем его поведение: запускаем, наблюдаем, тестируем. Меняем программу, добиваемся изменения принципа работы робота. Меняем его конструкцию.
У кого в закладках
В данной инструкции мы расскажем вам, как можно построить самостоятельно роботизированную руку с комплектом Lego Mindstorms NXT. На самом деле, в этой инструкции автор хотел сделать штатив для своей камеры. Но это оказалось трудным заданием. После нескольких экспериментов автору удалось сделать простую роботизированную руку.
Если вы также хотите построить это устройство, вам необходимы:

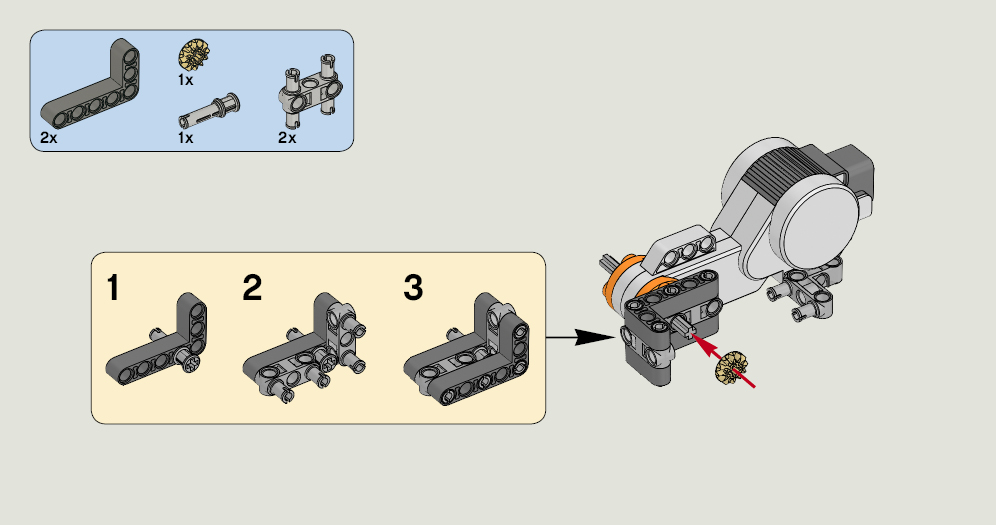
Шаг 1. Основа конструкции:
Основа, вероятно, является самой простой частью робота. Это всего лишь платформа для стационарного положения робота. Вы должны убедиться в том, что она длинная и достаточно широкая. Центр тяжести должен находиться где-то на верхней части основы, если это возможно, в середине. В другом случае, робот упадет.
Основа состоит из несколько деталей, которые поддерживают робота. Более сложные роботизированные руки имеют двигатели в основе. Эти двигатели перемещают руку, не двигая себя. Как правило, основа имеет двигатель, который вращает руку, но данная рука вращается сама.
Вы можете быть гораздо более творческими со строительством робота, чем демонстрация в этой инструкции.











Шаг 2. Модуль вращения:
Это один из редких роботов, которые строятся из модулей. Данная рука робота состоит из трех модулей, один из которых является модулем вращения.
Это очень простой механизм. Он вращает руку влево и вправо, и поддерживает два других модуля. Он основан на суставе Matthias Paul Scholz вращения на 90 градусов, который вы можете найти здесь: http://mynxt.matthiaspaulscholz.eu/robots/motor90/index.html




Шаг 3. Модуль наклона:
Второй модуль является модулем наклона. Он расположен на вершине "модуля вращения". В принципе, у вас есть большое зубчатое колесо и небольшой механизм, который вращается вокруг большого колеса. Передача составляет 1:10. Таким образом, рука может вращаться очень точно.
На вершине этого модуля есть небольшая платформа, на которую крепится захват-коготь, но об этом мы расскажем позже.
Установка двух модулей вместе не может быть проще. Они удерживаются вместе с помощью одного вала-оси, вокруг которого вращается модуль наклона. Рука может наклоняться почти на 90 градусов, что является существенным показателем.





Шаг 4. Модуль захвата:
Это самый простой из трех модулей. Конструкция сочетает в себе самые основные виды когтей-захватов. Этот модуль крепится к платформе на модуле наклона.
Здесь, в принципе, всё ясно. Следуйте по картинкам при построении этого механизма.

Шаг 5. Установка датчиков и проводов:
Вам придется использовать три датчика: датчик света, сенсорный и звуковой датчики.
Датчик света (порт 3) находится на захвате и позволяет роботу знать, если ли на полу шарик, или нет (он также может распознать цвет шарика). Два других датчика расположены на платформе модуля наклона. Сенсорный датчик (порт 1) служит своего рода кнопкой для прикосновения, в то время как звуковой датчик (порт 2) измеряет уровень шума (вы можете давать роботу команды хлопками).
Теперь вам нужно подключить провода к роботу. Вы должны убедиться, что провода не мешают движениям и функциям робота. Вы должны также рассмотреть длину проводов для каждого датчика или двигателя.




Шаг 6. Добавьте блок NXT:
Блок NXT играет жизненно важную роль для роботов Mindstorms NXT, так что вы должны разместить его где-то на роботе (или по крайней мере где-то рядом). В данном случае только два блока держаться вместе – блок NXT и основа робота. Это очень практично, чтобы объект находился на основе робота, так как это делает его более стабильным.

Шаг 7. Приведение робота в порядок. Последние штрихи:
Когда вы будете довольны тем, как робот работает, можете приложить немного усилий касательно внешнего вида робота (только не забудьте первое правило). Как видите, в инструкции для «украшения» робота используются несколько оранжевых блоков, которые поставляются с комплектом NXT, но не используются для основной конструкции. Вы можете проявить больше фантазии в этом пункте.

Шаг 8. Программирование:
Есть 5 языков программирования, которые вы можете использовать: NXT-G (язык по умолчанию), NXC (не совсем C), Robolab, RobotC, pbLua и NXJ. В данном случае был использован NXT-G.
У вас есть свободный выбор программирования, поэтому не будем говорить об этом больше.
Ваш робот готов. Вы можете посмотреть на видео, как он работает. Это действительно интересная штука.